Title here
Summary here
Motor Encoders
A motor encoder is what turns a regular motor into a “Smart Motor.” A basic motor can only spin — it cannot track how fast it is going, which direction it is turning, or how far it has traveled. An encoder adds that intelligence.
Without motor encoders, it is very hard to drive precisely or control a robot arm accurately. With them, you can tell your robot to drive exactly 24 inches or rotate a lift arm exactly 90 degrees!
Why does this matter?
Every precise autonomous routine depends on encoders. They are the robot’s sense of “how much did I move?” Without that information, autonomous driving is just guessing.
How it Works
Most VEX encoders use optical technology. Here is what happens inside the motor:
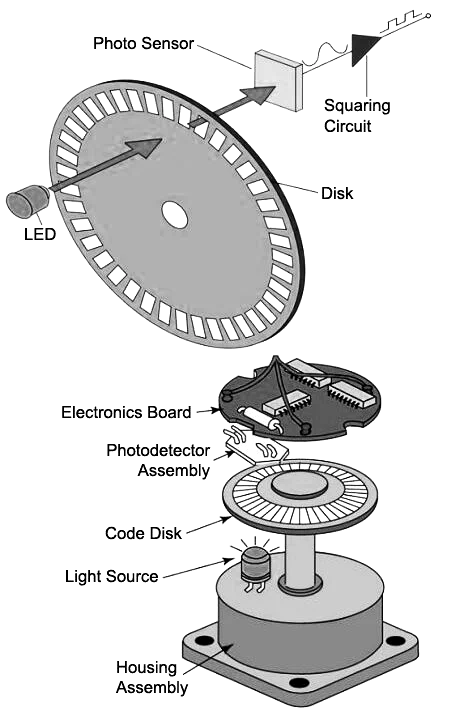
The encoder actually has two light sensors placed slightly apart. By checking which sensor detects the light first, the encoder can tell whether the motor is spinning clockwise or counterclockwise, and how fast.
Types of VEX Encoders
VEX IQ Smart Motor:
VEX V5 Smart Motor:
The Math
Most VEX coding tools (like VEXcode Pro or PROS) automatically convert ticks into degrees or rotations for you. But if you are building custom code, here is the formula to convert raw ticks into degrees:
$$ \text{Degrees} = \text{Ticks Measured} \times \left(\frac{360}{\text{Ticks Per Revolution}}\right) $$What You Can Measure
From an encoder, your code can read three useful values:
Limitations
Encoders only track the rotation of the motor’s internal gears. If the wheels slip on the field — for example, during a hard push from another robot — the motor is still spinning but the robot is not actually moving. The encoder still counts those ticks, making the robot think it has moved further than it really has.
See Odometry and Localization to learn how to handle this problem.