Title here
Summary here
Drivetrains
A drivetrain is the moving base of a robot. It includes the wheels, motors, gears, and frame that let the robot travel around the field. Picking the right drivetrain is one of the most important decisions your team makes — it affects how fast, how strong, and how maneuverable your robot will be.
There are four common drivetrain types in VEX robotics:
Why does this matter?
The drivetrain you choose shapes every other decision on the robot. A slow, powerful drivetrain suits pushing matches. A fast, agile drivetrain suits games that require quick movement and precise positioning.
Tank Drive
Tank Drive is the most classic and simple drivetrain. The left wheels are controlled by one set of motors, and the right wheels are controlled by another set — just like the tracks on a military tank!
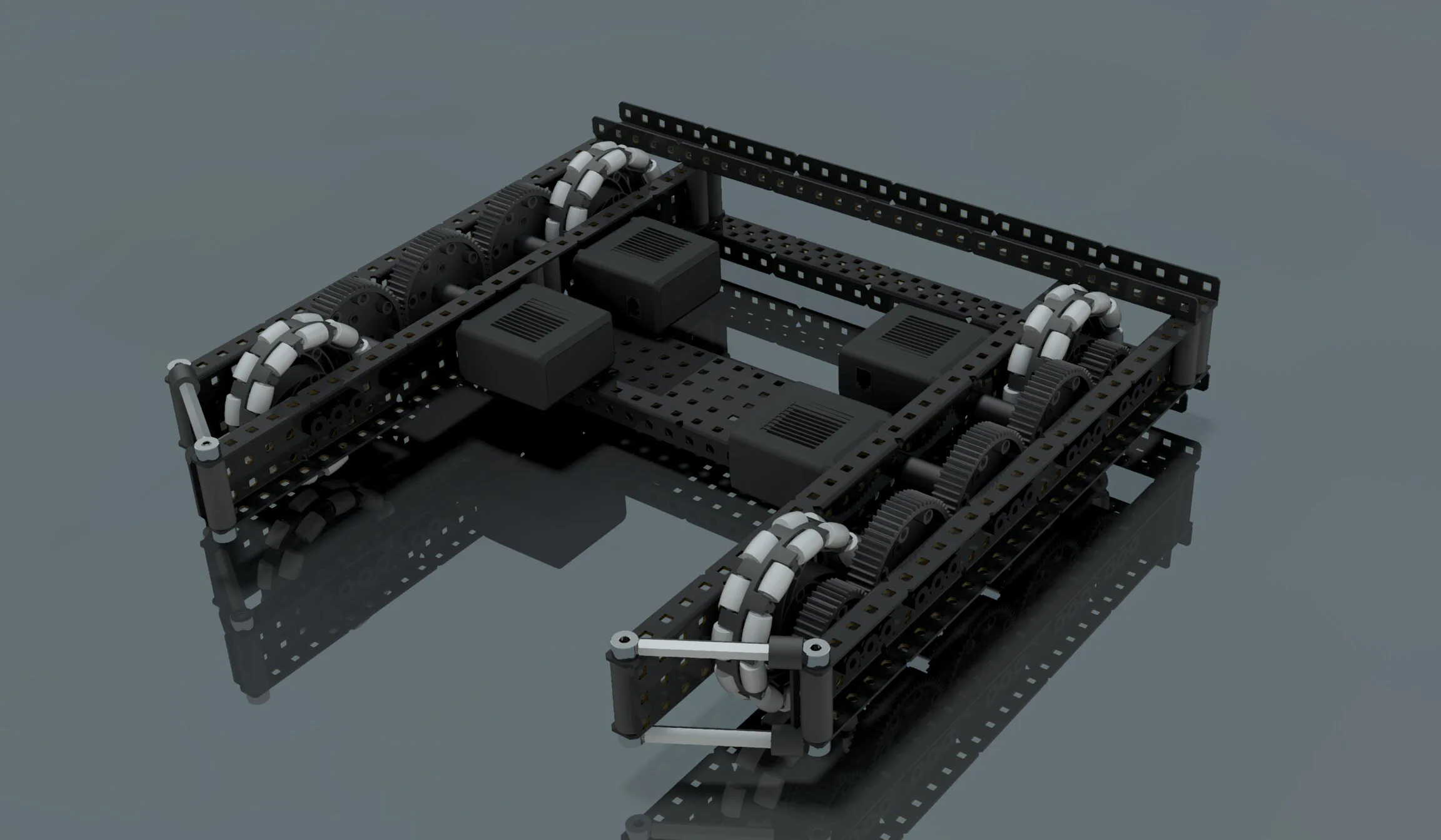
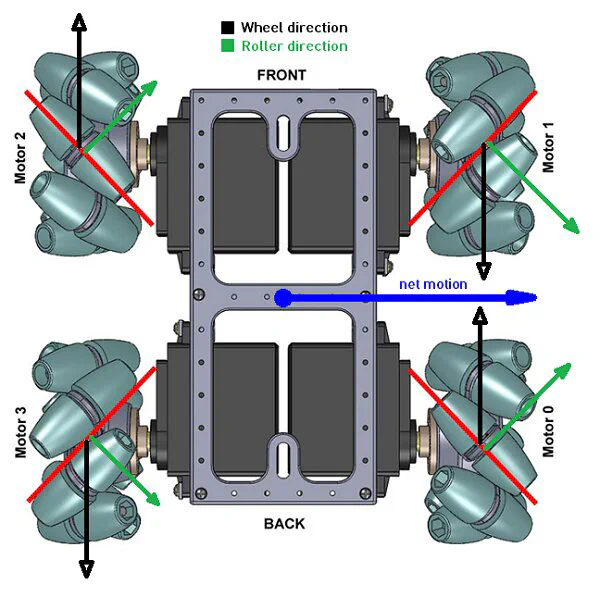
Mecanum Drive
Mecanum Drive uses 4 special mecanum wheels. These wheels have small rollers attached at a 45-degree angle around the rim. By spinning the four wheels in different combinations, the forces cancel out in certain directions and push the robot sideways!

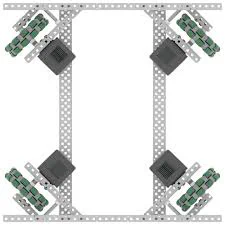
X-Drive
An X-Drive uses four regular omni wheels, but each wheel is pointed outward at a 45-degree angle, making the robot look like the letter “X” from above.
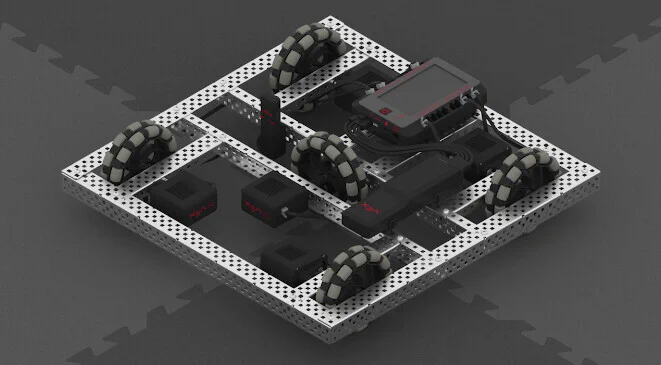
H-Drive
H-Drive looks like a normal tank drive, but with one or two extra wheels mounted sideways in the center of the robot. From above, it looks like the letter “H.”
| Drivetrain Style | Agile | Pushing Power | Speed | Complexity |
|---|---|---|---|---|
| Tank | ❌ | 🟢 Very high | 🟡 Medium | 🟢 Easy |
| Mecanum | ✔️ | 🔴 Low | 🟡 Medium | 🟡 Medium |
| X-Drive | ✔️ | 🔴 Very Low | 🟢 Very High | 🔴 Hard |
| H-Drive | ✔️ | 🟢 High (Forward) | 🟡 Medium | 🟡 Medium |
Each drivetrain type needs different code and controls to drive well. Make sure your programming matches your drivetrain choice!